乐鱼全站官网app下载
步进电机的结构和接线方案
步进电机作为位置控制的一种执行装置在许多场合都可能会用到,换句话说它是一种将电脉冲信号转换成线位移或者角位移的一种特殊电机,比如在空调中就用到了微型的步进电机用来用来调整空调的出风口的扇叶的角度、以前电脑光驱的弹进和弹出以及经济型的数控机床上也会用到步进电机。今天我们来聊一聊关于步进电机的一些问题。步进电机的分类步进电机的种类有多种,总体来说可大致分为反应式步进电机、永磁式步进电机和混合式步进电机三种,在这三种步进电机当中运用最为广泛的一种是混合式步进电机,这种电机具有前两种电机的优点,比如混合式步进电机的转矩大、动态性能好、控制位置的精度高,在工业上使用的较为广泛,其外形如下图所示。
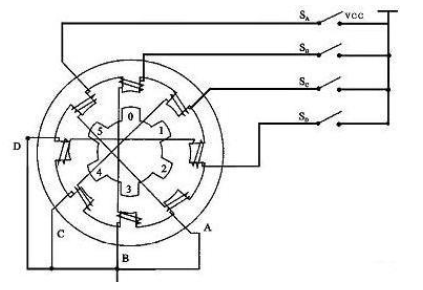
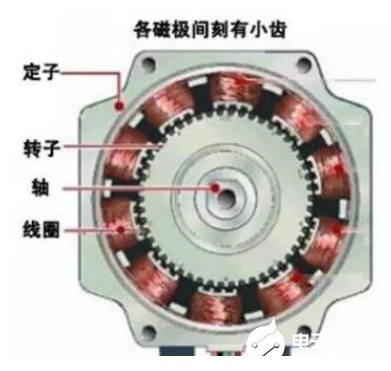
步进电机的结构与工作原理现在我们以四相永磁式步进电机模型为例子来谈谈步进电机的结构,我们先来瞧瞧步进电机的内部结构示意图,我们从图中能够正常的看到在步进电动机里有一个可以转动的部分,它的民资叫“转子”,为了更能说明问题,在每个转子的齿上都编了一个号,从图中能够正常的看到它有六个齿。我们在看它的外圈是不转的,我们称它是“定子”,在定子上有八个齿。我们从步进电机的实物图中能够正常的看到,在定子的每个齿上都缠绕了一个线圈绕组,我们从步进电机的示意图能够正常的看到,正对着两个齿上的绕组它们是串联在一起的,它们是可以同时得电和同时断电的,这样以来就形成了四相绕组。
我们在示意图上用A-B-C-D来标注。因此这种步进电机就叫“四相”步进电机。我们假设先B相绕组闭合导通,这样就会在所对应的定子绕组齿上产生磁极,此时转子的“0”号和“3”号离它们最近,这样就会产生最强的吸引力。然后把B相断开,接通C相时,转子的“1”号和“4”号距离它们比较近,这样它们就会与C相绕组对齐。这样一来转子就会按照逆时针的方向转动一定的角度。如此以来,如果我们按照B相-C相-D相-A相的顺序给步进电机的绕组通电的话,这样步进电机的转子就会按照逆时针的方向不停地运转。通过我们的分析不难得知,只要我们给步进电机的电子绕组输入一序列的电脉冲信号,那么步进电机的转子就会不停地转动一个角度,这就是步进电机名称的由来。
步进驱动器与步进电机的接线我们大家都知道步进电机需要给绕组通入电脉冲,但是这个电脉冲需要有一定的幅值和宽度才可以使步进电机转动起来,因此这就要给步进电机加一个驱动装置,对于微型步进电机我们大家可以用三极管或者驱动芯片来担当驱动装置,像我以前学单片机时,在学习步进电机驱动程序的时候我曾经亲自用9012PNP三极管搭接了一个微型步进电机的驱动装置,如果用驱动芯片的线A芯片也可以。但是如果是大功率的步进电机,像几十瓦到上百瓦功率的步进电机就需要专用的步进驱动器了。步进电机的接线我们以两相双极混合型步进电机为例来说明它的接线方法,如果我们不知道这四根线的绕组,我们大家可以用万用表的电阻档去测量,若测得的两根步进电机引出线之间有阻值的话,则说明它们俩是同一绕组。
对于两相双极混合型步进电机它有四根引出线,通过用万用表测量会得出,其中红色线和蓝色线是阻值较小,它们是同一个绕组;同样绿色线和黑色线阻值较小,它们俩也是同一绕组。接线时,只要把同一绕组的步进电机的驱动器上相应输出端子上,比如上图中的A+和A-接在同一个绕组上,B+和B-接在另一个绕组上即可。接好后开机试车,如果转向与我们的要求不一样,只要把A+、A-和B+、B-对调就可以了。
相关新闻
- 文远知行2024-10-15
- 凤岗企业纷繁放出鼓舞职工留莞新年大招有企业预付近2000万2024-10-15
- 【深度】开特股份832978BJ:汽车空调系统“小巨人”募投巩固传感器TOP3地位开源北交所研究2024-10-15