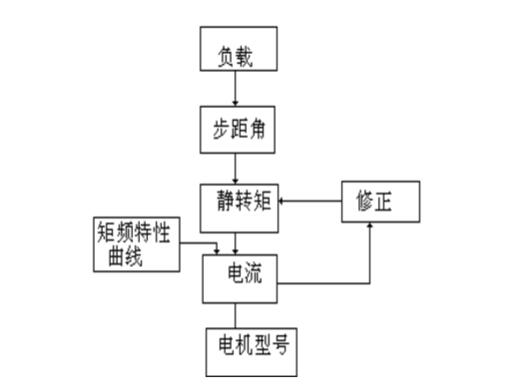
电机的步距角取决于负载精度的要求,将负载的最小分辨率(当量)换算到电机轴上,每个当量电机应走多少视点(包含减速)。电机的步距角应等于或小于此视点。现在市场上步进电机的步距角一般有0.36度/0.72度(五相电机)、0.9度/1.8度(二、四相电机)、1.5度/3度(三相电机)等。
步进电机的动态力矩一会儿很难确认,咱们往往先确认电机的静力矩。静力矩挑选的根据是电机作业的负载,而负载可分为惯性负载和冲突负载二种。单一的惯性负载和单一的冲突负载是不存在的。直接起动时(一般由低速)时二种负载均要考虑,加快起动时首要考虑惯性负载,恒速运跋涉只需考虑冲突负载。正常的情况下,静力矩应为冲突负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确认下来(几许尺度)
静力矩相同的电机,因为电流参数不同,其运转特性不同很大,可根据矩频特性曲线图,判别电机的电流(参阅驱动电源、及驱动电压)。
步进电机一般在较大范围内调速运用、其功率是改变的,一般只用力矩来衡量力矩与功率换算如下:
其P为功率单位为瓦,Ω为每秒角速度,单位为弧度,n为每分钟转速,M为力矩单位为牛顿.米 P=2πfM/400(半步作业) 其间f为每秒脉冲数(简称PPS)
*博客内容为网友个人发布,仅代表博主个人自己的观念,如有侵权请联络作业人员删去。
